- Будівельне обладнання
- Геодезичне обладнання
- Дрони та 3D сканери
- Аксесуари
- Послуги

Опубліковано: 26 червня 2026 р.
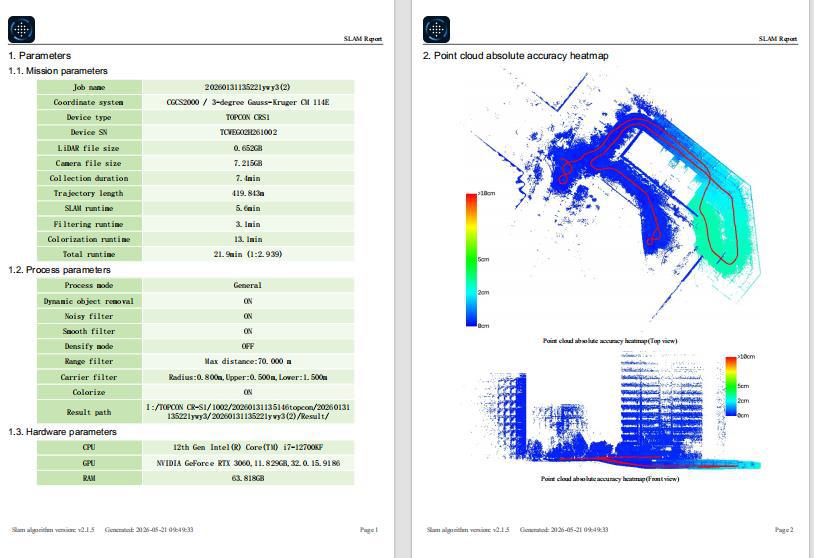
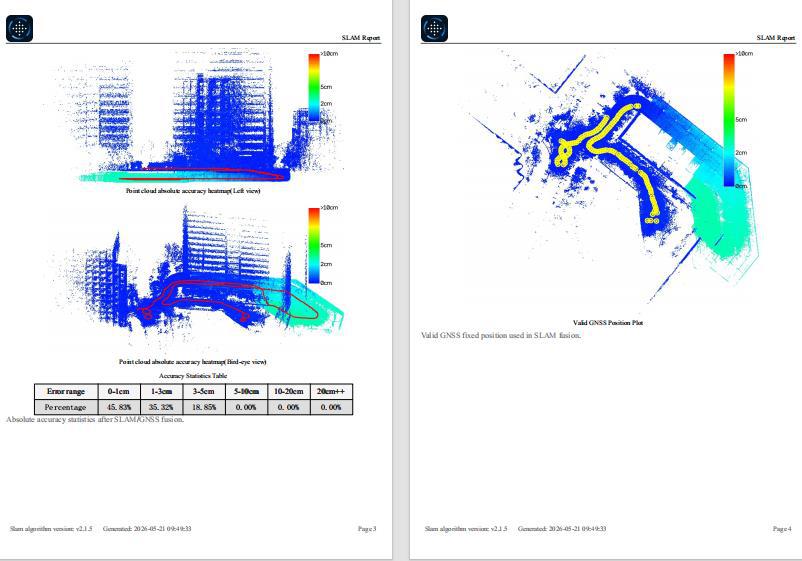
MAGNET Bridge V9.1.2 впроваджує автоматичне створення звітів SLAM, що значно покращує документування проектів та ефективність.
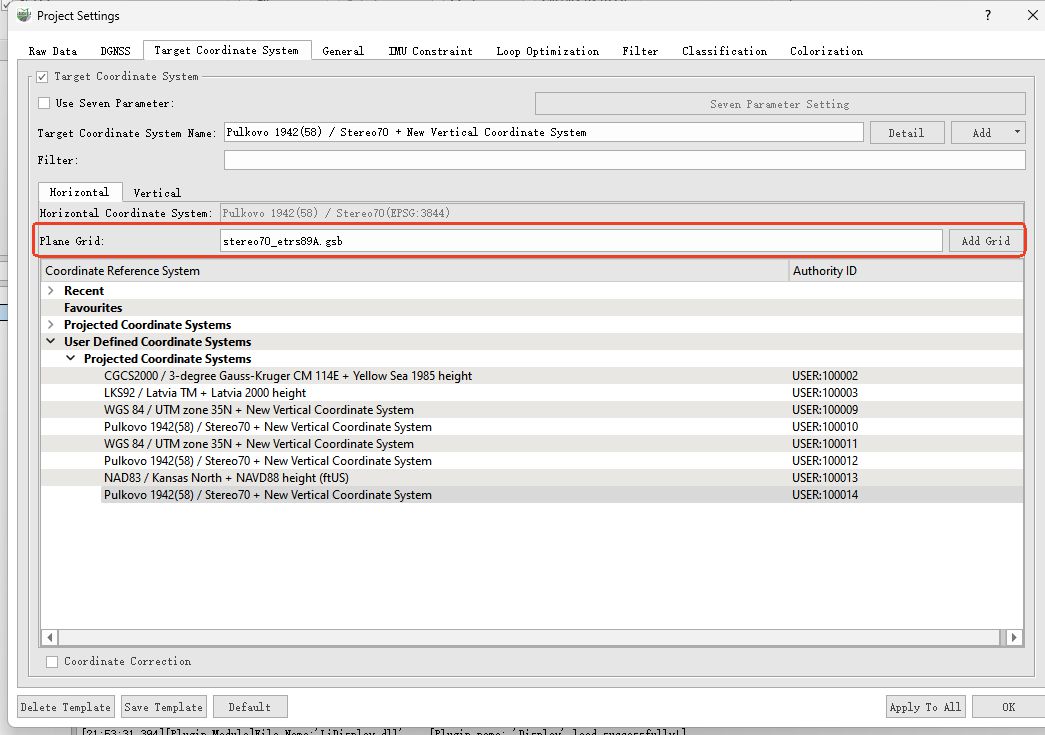
Тепер система створює детальні звіти, включаючи параметри місії, метрики точності, аналіз помилок та результати GCP — забезпечуючи стабільні, високоякісні вихідні матеріали з мінімальними ручними зусиллями.
Крім того, цей реліз включає покращену продуктивність видалення динамічних об'єктів, підвищуючи якість даних завдяки більш ефективному фільтруванню рухомих об'єктів під час обробки.
Пряме посилання на my Topcon NOW! для:
©2026 Topcon Positioning Systems, Inc., Усі права захищені
Будь ласка, знайдіть час, щоб прочитати ці Примітки до релізу. Вони містять інформацію про наступне:
ПРИМІТКА: Перед оновленням програмного забезпечення користувачам завжди рекомендується робити резервну копію своїх вихідних проектних даних.
Додано підтримку генерації LOD-MESH (формат osgb) або вихідних файлів obj, сумісних з усіма пристроями серій CR/SR.

Result/Mesh.Генерація звітів SLAM, які включають: параметри місії, параметри slam, апаратні специфікації, помилки та рішення SLAM, звіт про точність SLAM, звіт про точність контрольних точок (checkpoint) та звіт GCP.
Підтримуються формати сіток планового зсуву, такі як TIF, GTX та GSB.
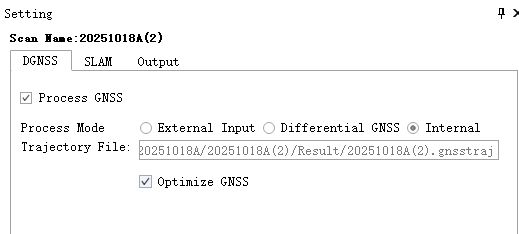
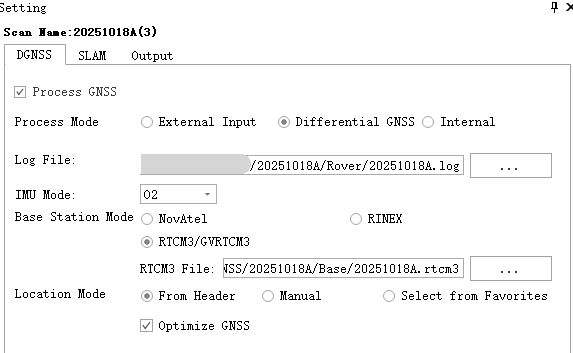
Оптимізує результати GNSS (результати RTK або PPK) на основі SLAM. Застосовується в умовах під кронами дерев (у лісі), складних міських умовах, на підстанціях, водних ділянках та подібних сценаріях. Ця опція вимкнена (прапорець знято) за замовчуванням.

Дозволяє вибирати роздільну здатність панорами для виходу, при цьому за замовчуванням встановлено оригінальну роздільну здатність панорами. Також підтримується вихід у позначених панорамних роздільних здатностях 4K, 8K та 12K (3840*1920, 7680*3840, 11904*5952).

Примітка: При виборі вихідної роздільної здатності, яка є вищою за оригінальну, вимоги до цієї роздільної здатності виконуються, але деталізація зображення не збільшується.
Ефективність колоризації покращено на 15% для великих площ (що перевищують 10 000 квадратних метрів) або при тривалості збору даних понад 20 хвилин.
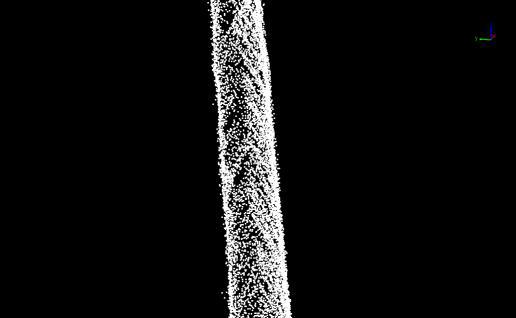
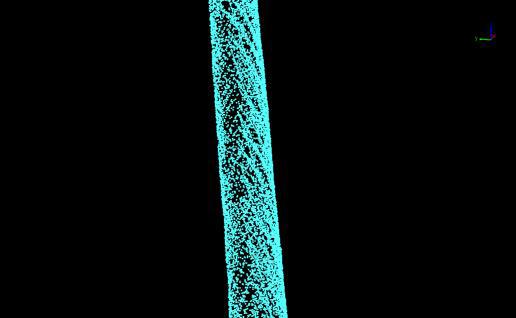
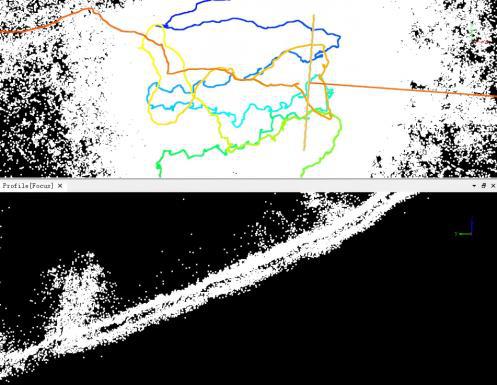
ЛІВОРУЧ: Ефект фільтрації стовбурів у версії 9.0.2; ПРАВОРУЧ: Ефект фільтрації стовбурів у версії 9.1.2.
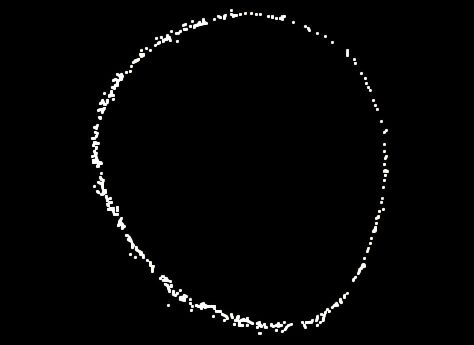
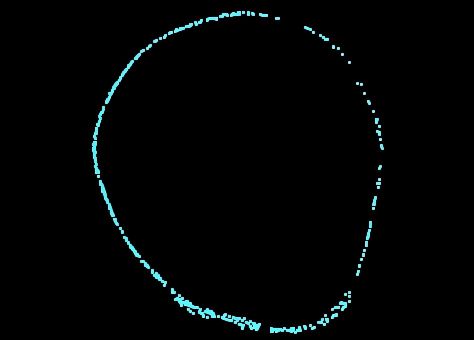
Покращено ефект фільтрації стовбурів та ефект фільтрації на висоті грудей (DBH) у версії 9.1.2 порівняно з версією 9.0.2.
Змінено з оригінального формату за замовчуванням РРРР-ММ-ДД-ГГ-ХХ-СС.mscan на РРРРММДДГГХХ.mscan (наприклад, 2026-01-26-17-51-23.mscan змінено на 202601261751.mscan).
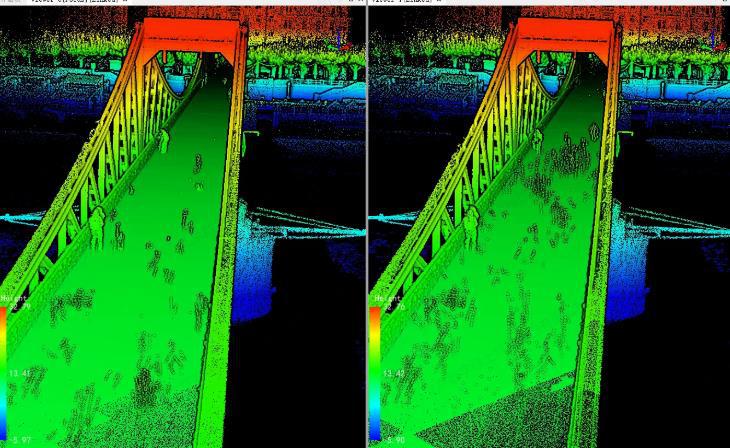
Значно підвищено якість фільтрації рухомих об'єктів під час обробки даних порівняно з попередньою версією 9.0.2.
 Будівельне обладнання
Будівельне обладнання
 Геодезичне обладнання
Геодезичне обладнання
 Дрони та 3D сканери
Дрони та 3D сканери
 Аксесуари
Аксесуари
 Послуги
Послуги
Кошик порожній







































































































































