- Будівельне обладнання
- Геодезичне обладнання
- Дрони та 3D сканери
- Аксесуари
- Послуги


Сучасні системи мобільного лазерного сканування (MLS — Mobile Laser Scanning) відіграють дедалі більшу роль у цивільній інженерії, геодезії та управлінні інфраструктурою. Це можуть бути передові системи, спеціально розроблені для роботи з транспортними засобами (переважно автомобілями), оснащені низкою пристроїв або датчиків, таких як скануючі головки LiDAR, камери 360°, GNSS-приймачі, IMU-датчики або одометри. Вони чудово підходять для вимірювання великих площ або відстаней, наприклад, розлогих міських просторів або довгих ділянок доріг. Однак застосування таких спеціалізованих систем не завжди виправдане, особливо якщо ділянка, яку потрібно виміряти, не є настільки великою. Для цього можна використовувати сканери, що працюють на основі алгоритму SLAM, застосування яких є більш універсальним. Вони підходять для вимірювання як всередині, так і зовні будівель, а також у більш складних польових умовах, таких як лісисті місцевості.
Одним із найновіших рішень у цьому класі пристроїв є сканер FARO Orbis — компактний мобільний сканер, розроблений для ефективного збору просторових даних у русі. Стандартний режим його роботи — тримання в руці або встановлення на телескопічному моноподі. Завдяки модульній конструкції та різноманітним адаптерам, також є можливість інтеграції з різними транспортними засобами.
Попередньо вимірявши контрольні точки за допомогою GNSS-приймача або тахеометра, ми можемо покращити точність польових вимірювань і прив'язати скан до геодезичної системи координат (наприклад, УСК-2000). Сканер має радіус дії до 120 метрів, тому здатний фіксувати навіть більш віддалені об'єкти. Крім того, він реєструє дані зі швидкістю 640 000 точок/с, завдяки чому при русі на вищих швидкостях (навіть до 50 км/год) сканер отримує достатньо даних для локалізації в просторі та створення точної хмари точок без зсувів або помилок зшивання.
Додатково сканер оснащений камерою 360°, яка у версії Orbis Premium створює фотографії з роздільною здатністю до 72 Мп.
 Керування сканером може здійснюватися через додаток FARO Stream та Wi-Fi з'єднання. Завдяки йому ми можемо в режимі реального часу спостерігати за областю, що сканується, а також розпочинати/зупиняти сканування або включати вимірювання контрольних точок.
Керування сканером може здійснюватися через додаток FARO Stream та Wi-Fi з'єднання. Завдяки йому ми можемо в режимі реального часу спостерігати за областю, що сканується, а також розпочинати/зупиняти сканування або включати вимірювання контрольних точок.
У цій статті будуть розглянуті технічні аспекти роботи FARO Orbis у конфігурації вимірювання за допомогою автомобіля, зокрема огляд використовуваного обладнання, умов тестування та вимог до вимірювання. Також будуть представлені отримані дані та можливі способи використання даних такого типу.
Для тестів використовувався заводський адаптер для встановлення сканерів GeoSLAM ZEB-Horizon (попередник Orbis) та FARO Orbis версії 1.0. Він оснащений 4 потужними магнітами та додатковими страхувальними тросами. Магніти вкручуються, тому частину з них можна замінити на присоски (купуються окремо). На адаптері можна закріпити як скануючу головку, так і даталогер (комп'ютер, який керує всім процесом вимірювання). Під час тестів сканер був встановлений на краю даху і спрямований вліво, щоб краще сканувати габарити дороги.
 Для вимірювання використовувався додаток FARO Stream, який через Wi-Fi з'єднання дозволяє керувати процесом сканування та переглядати зібрані дані в реальному часі. Завдяки цьому не було необхідності виходити з автомобіля для обслуговування сканера (початок, завершення сканування).
Для вимірювання використовувався додаток FARO Stream, який через Wi-Fi з'єднання дозволяє керувати процесом сканування та переглядати зібрані дані в реальному часі. Завдяки цьому не було необхідності виходити з автомобіля для обслуговування сканера (початок, завершення сканування).
Під час тестів сканували переважно міські райони, у забудові, де домінують приватні будинки або невисокі споруди, але також і в типовому міському середовищі, включаючи дороги з двостороннім рухом із незабудованими територіями навколо.
На невеликих вуличках спальних районів автомобіль рухався зі швидкістю до 30 км/год, на багатосмугових дорогах — до 50 км/год, а кільцеві розв'язки об'їжджали по всьому периметру. Виробник рекомендує, щоб одне сканування не перевищувало 30 хвилин, оскільки довші скани можуть бути проблематичними в обробці для більшості доступних комп'ютерів (потрібно понад 64 ГБ оперативної пам'яті). Вимірювання також слід завершувати на близькій відстані (до 5 метрів) від місця початку, щоб траєкторія замкнулася принаймні в одну петлю. Слід також пам'ятати, що алгоритм SLAM використовує переважно відскановану геометрію для співставлення даних за підтримки даних з IMU-датчика (вся інформація про рух пристрою). Таким чином, сканування доріг на відкритій місцевості (наприклад, дороги, що проходять через поля, або швидкісні магістралі) може призвести до отримання некоректних даних через відсутність достатньої геометрії в безпосередній близькості від сканера. Для таких завдань найкраще використовувати системи, спеціально розроблені для сканування з транспортних засобів у будь-яких умовах.
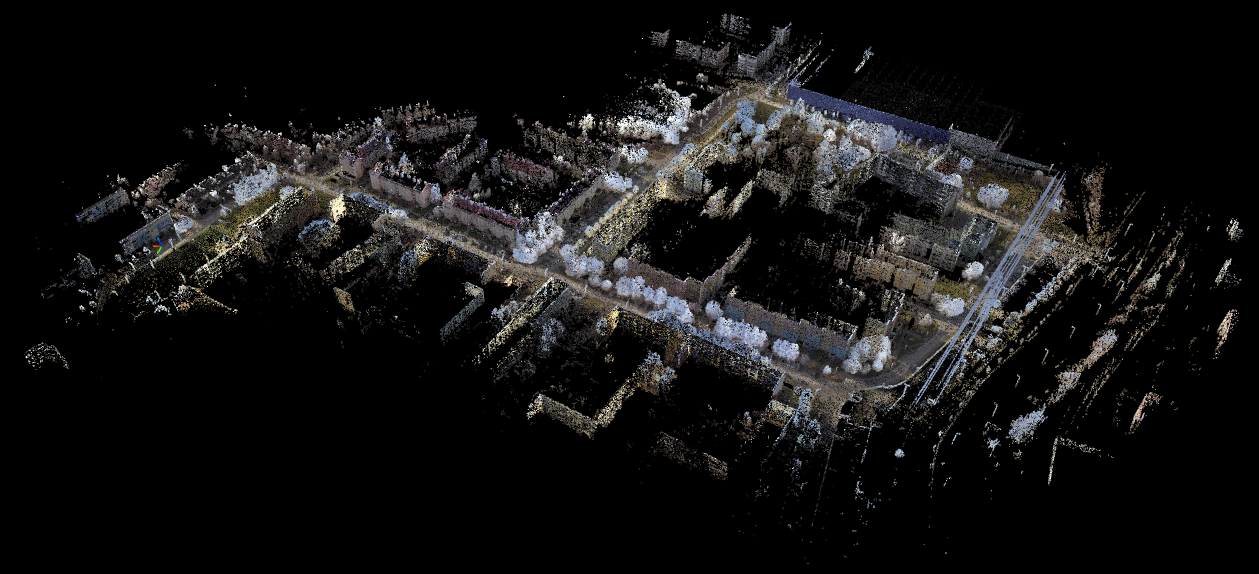
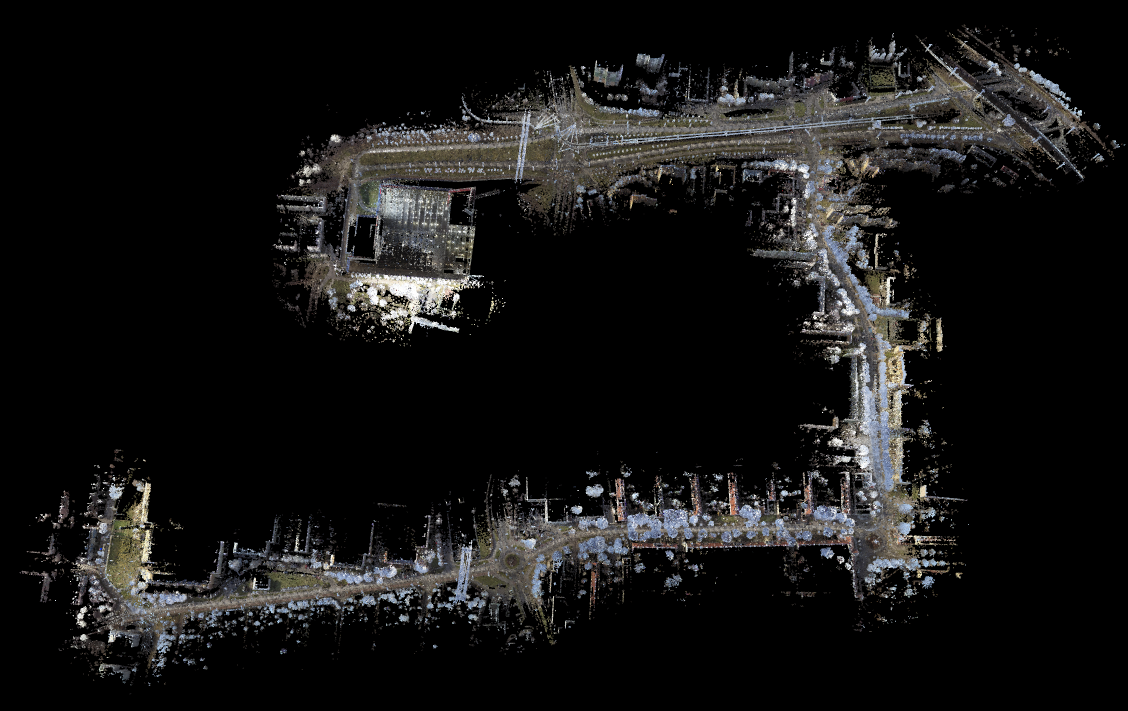
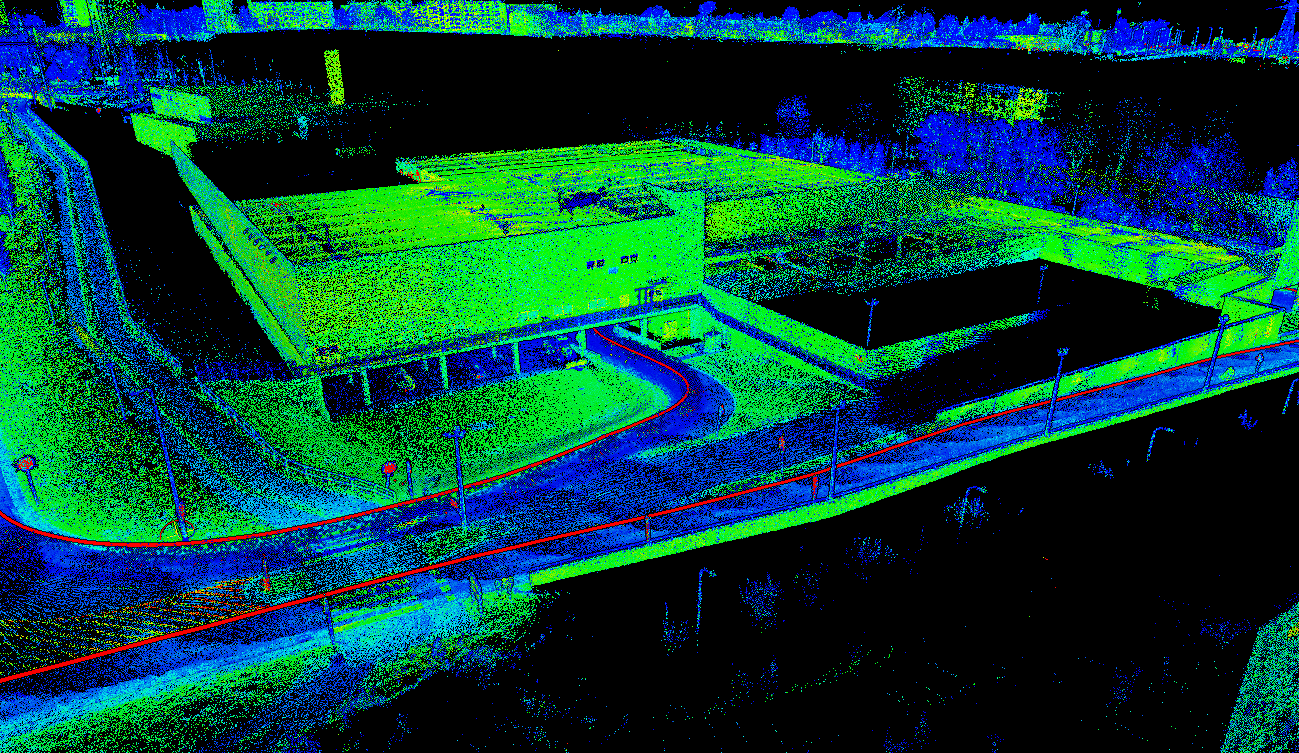
 Тестові заїзди зі сканером, встановленим на автомобілі, у Варшаві
Тестові заїзди зі сканером, встановленим на автомобілі, у Варшаві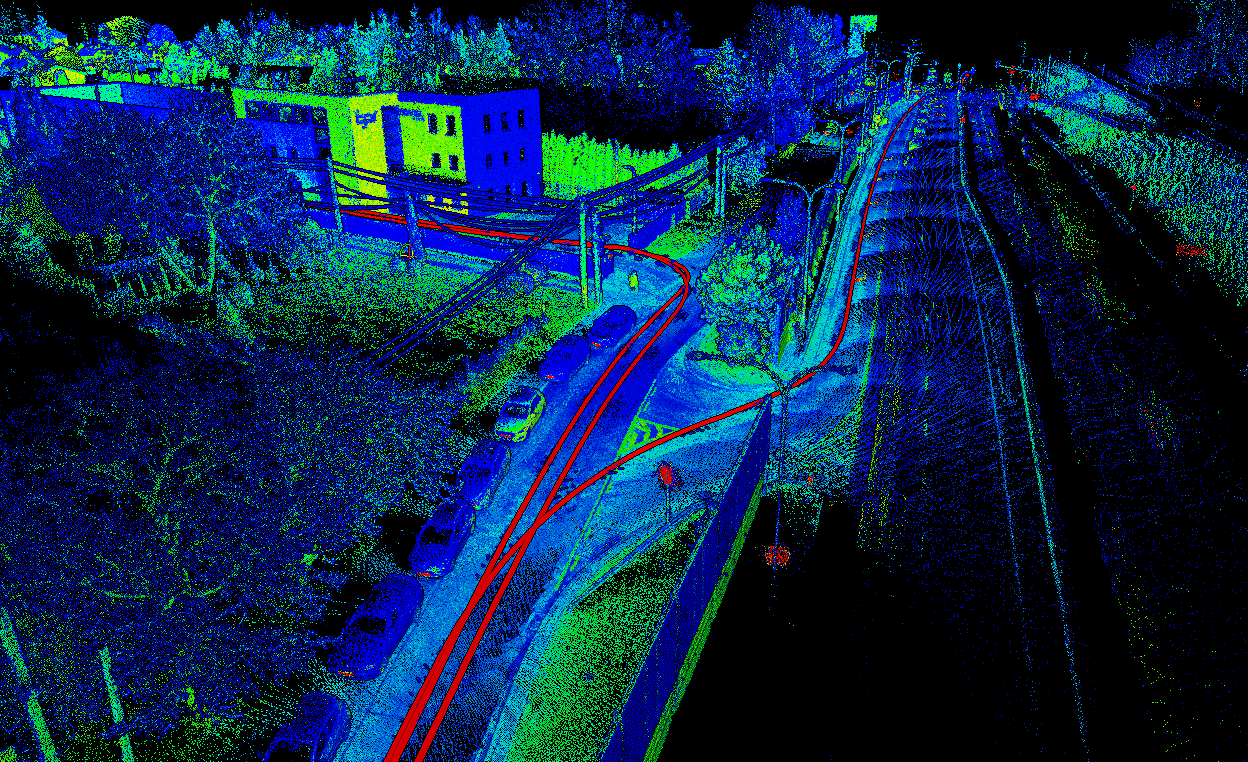
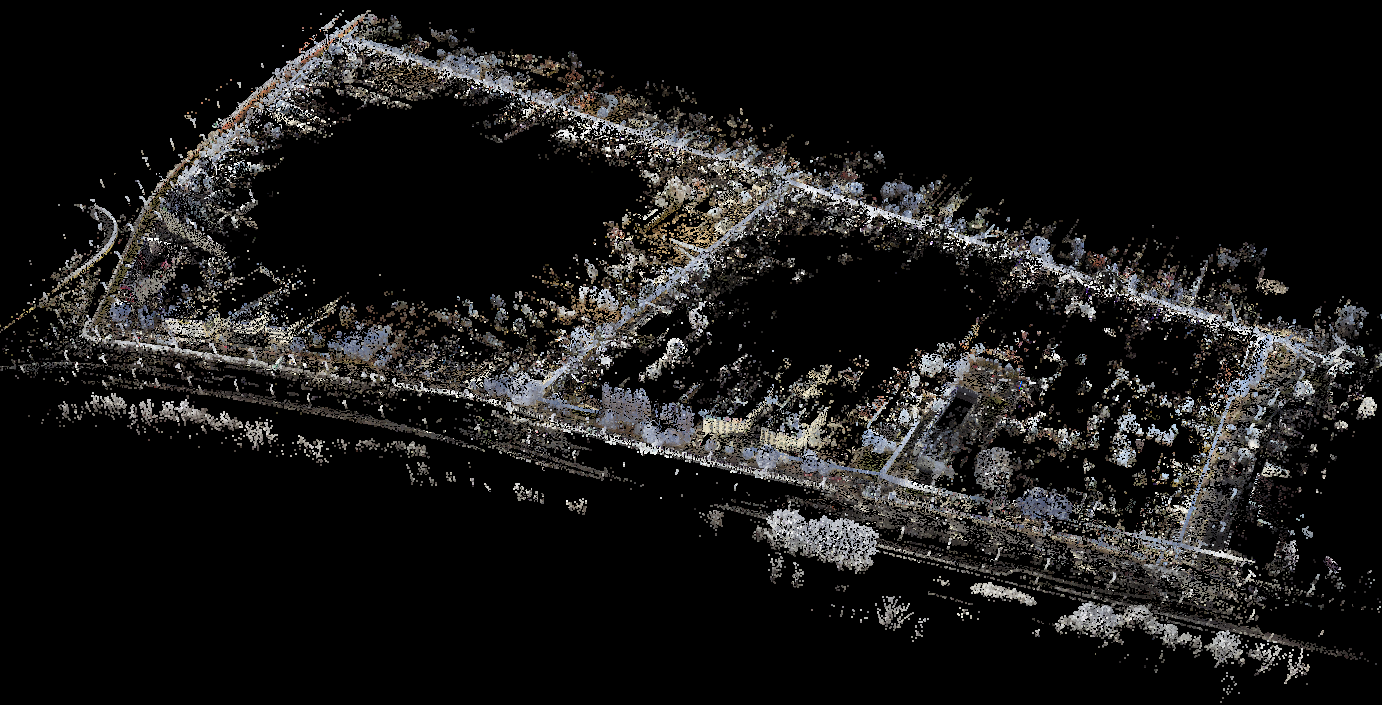
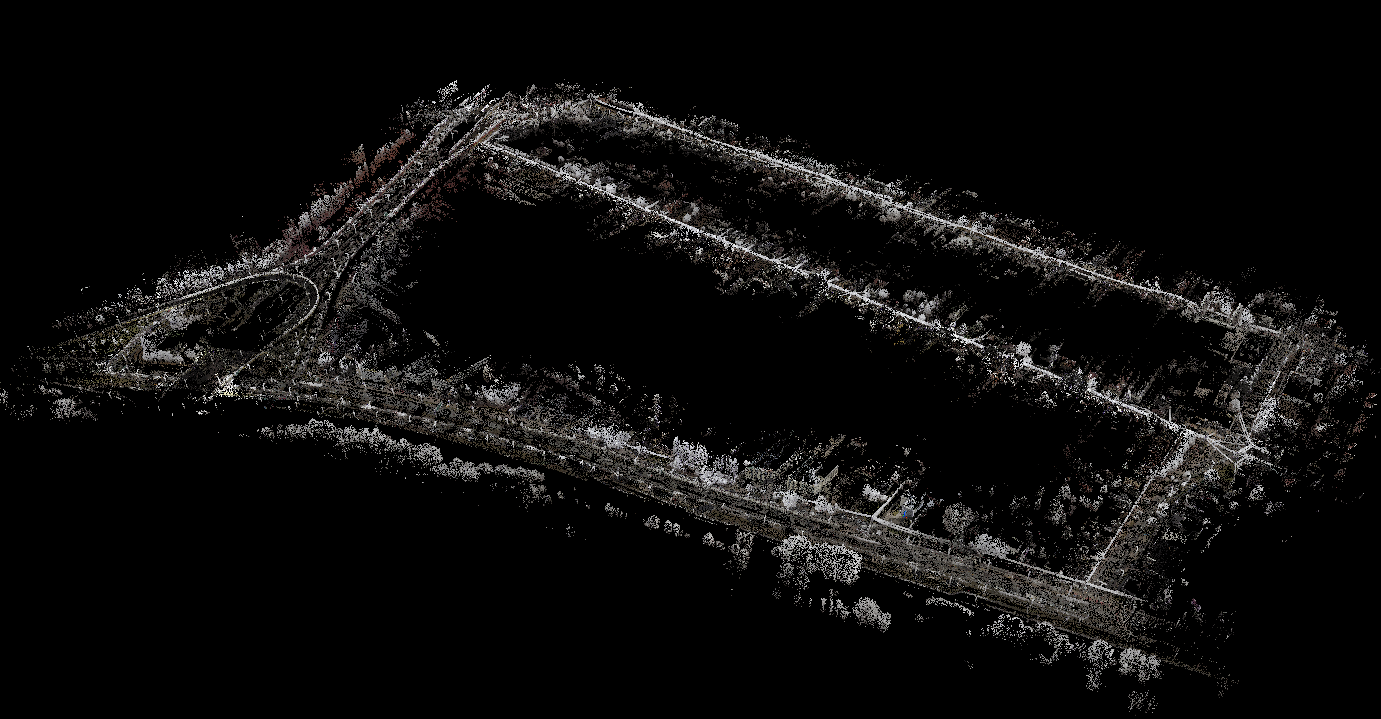
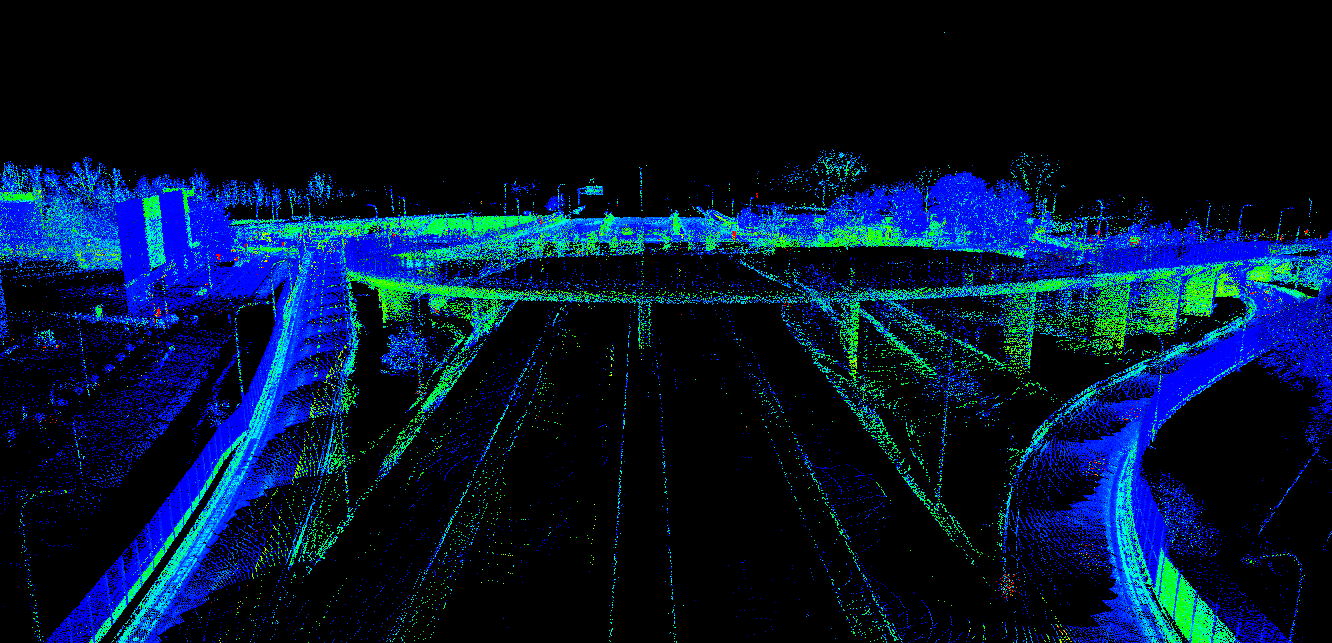
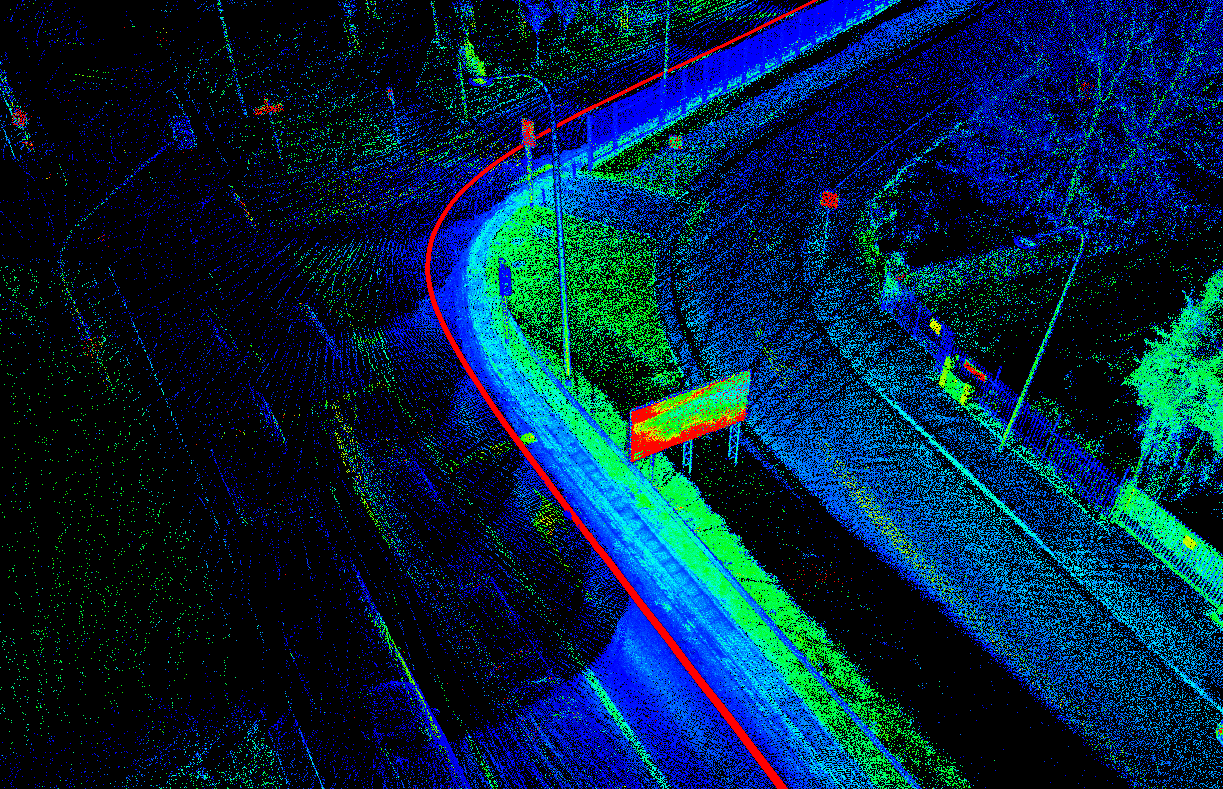
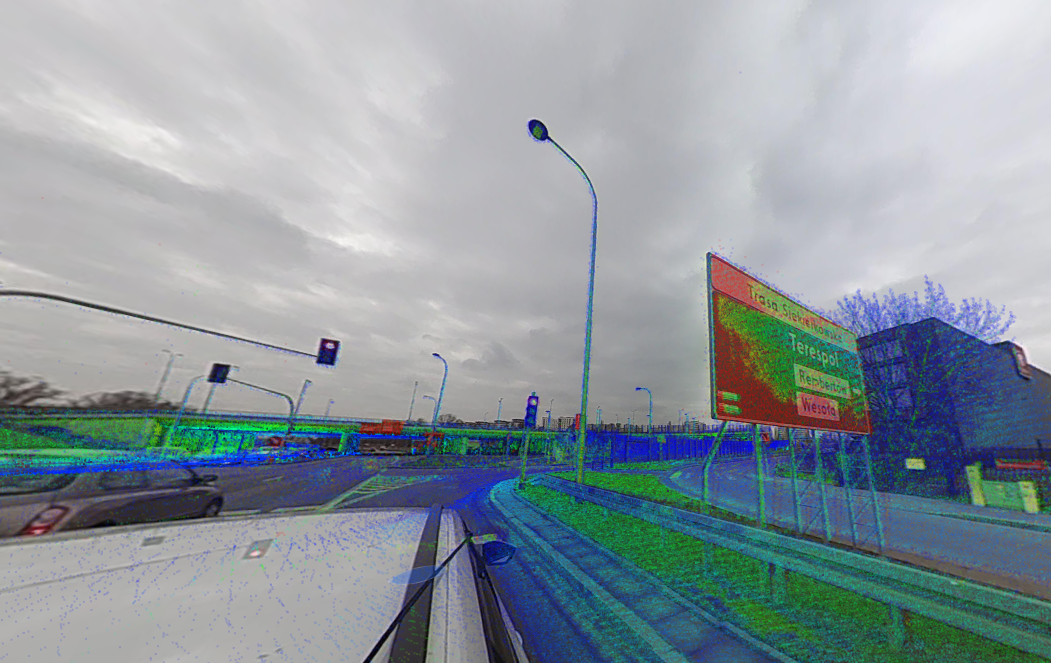
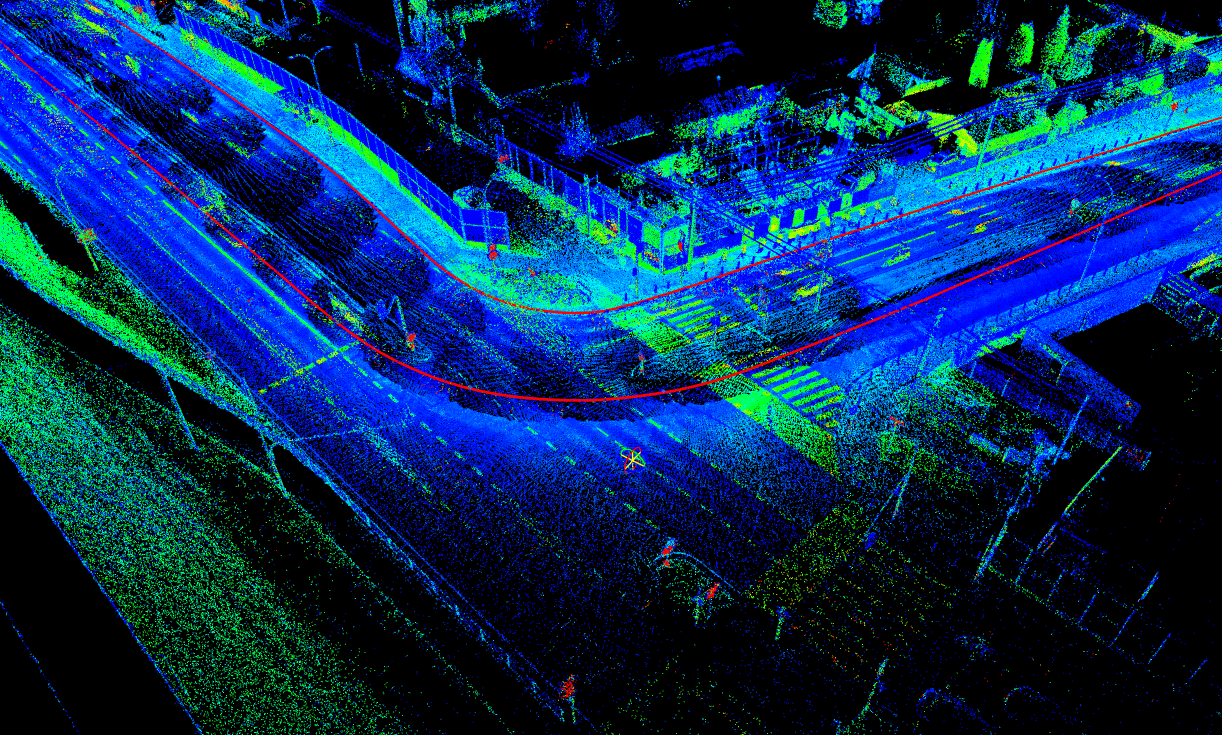
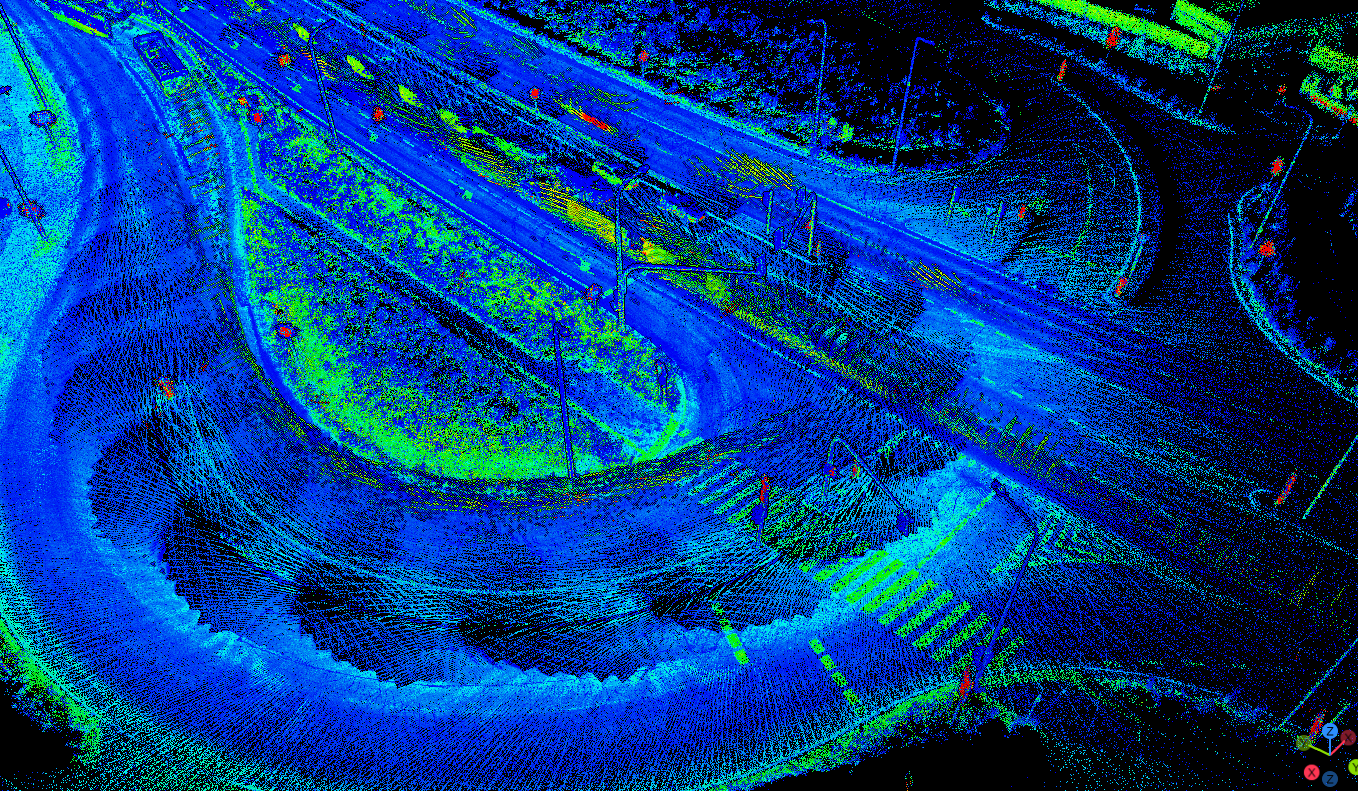
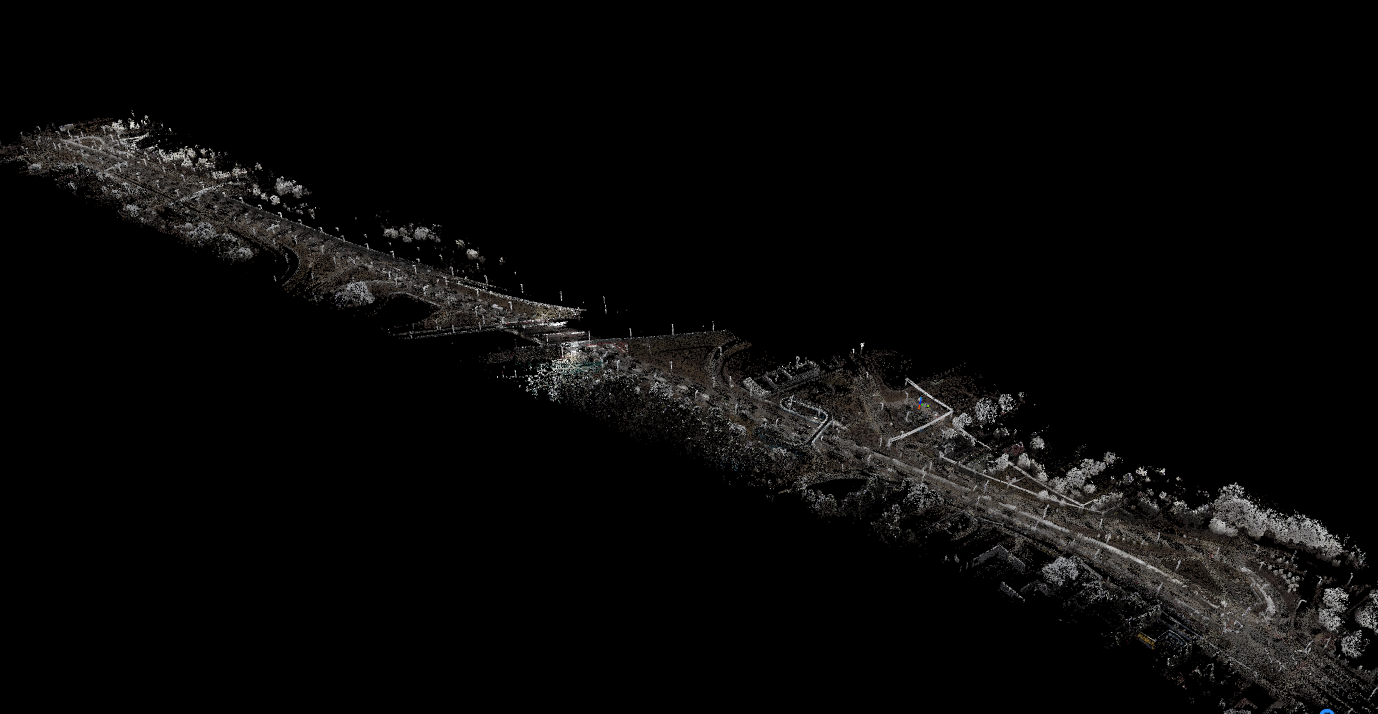
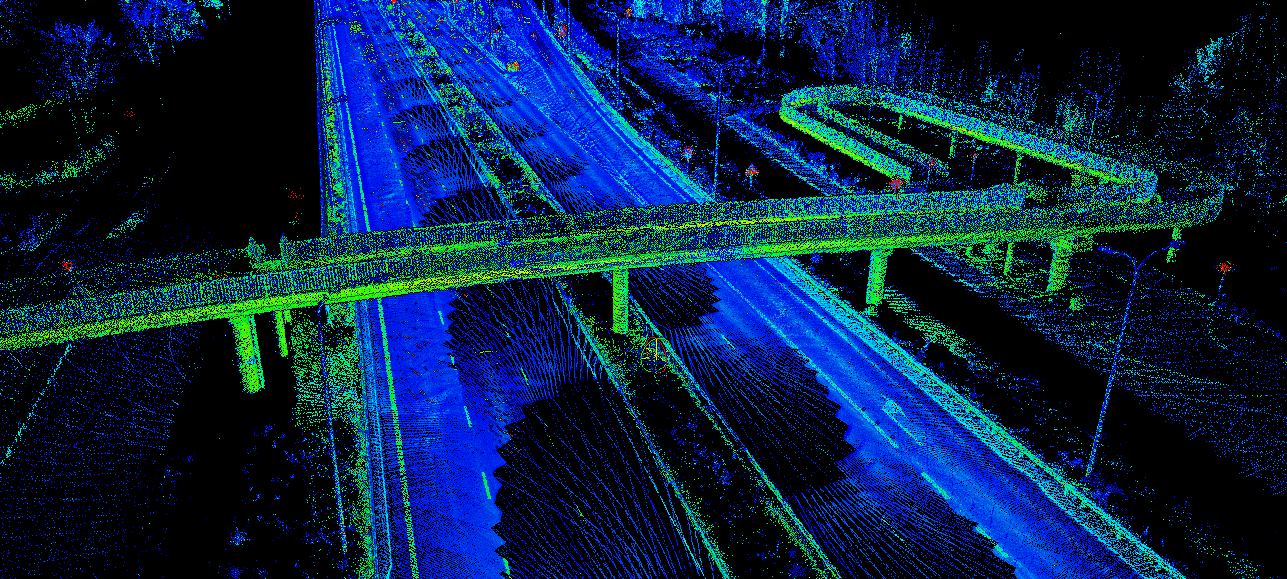
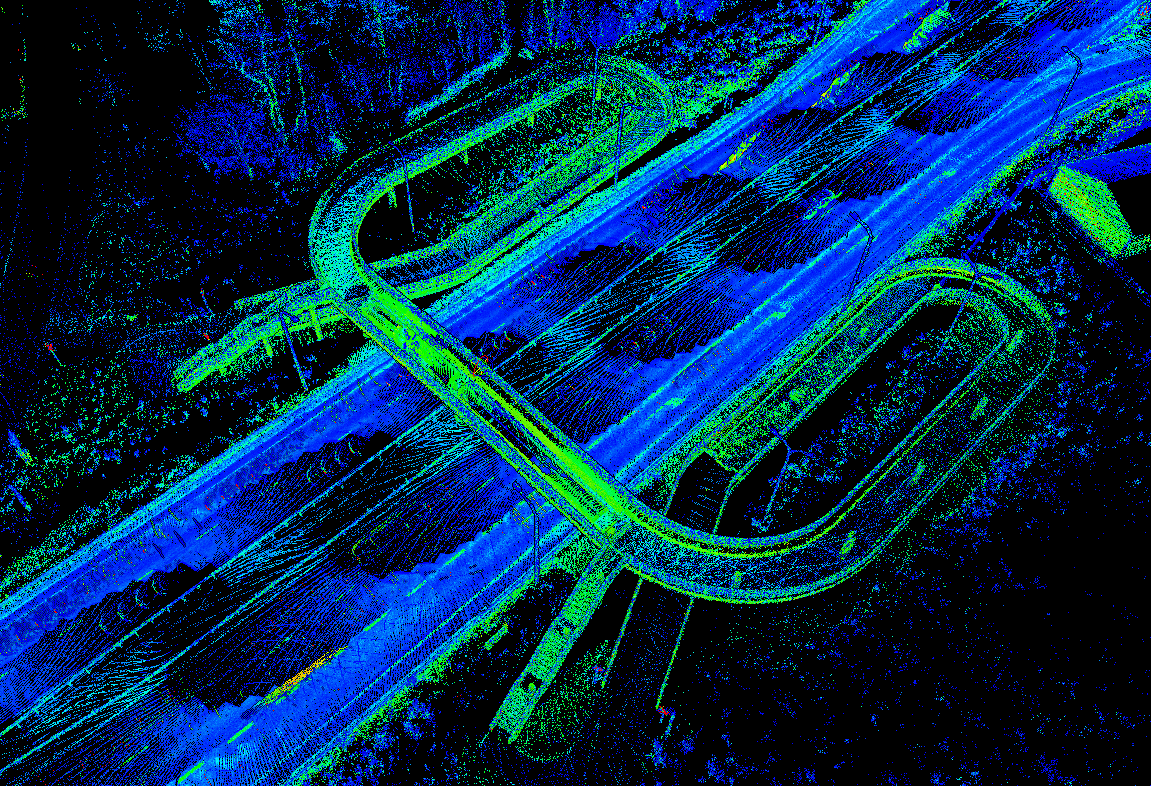
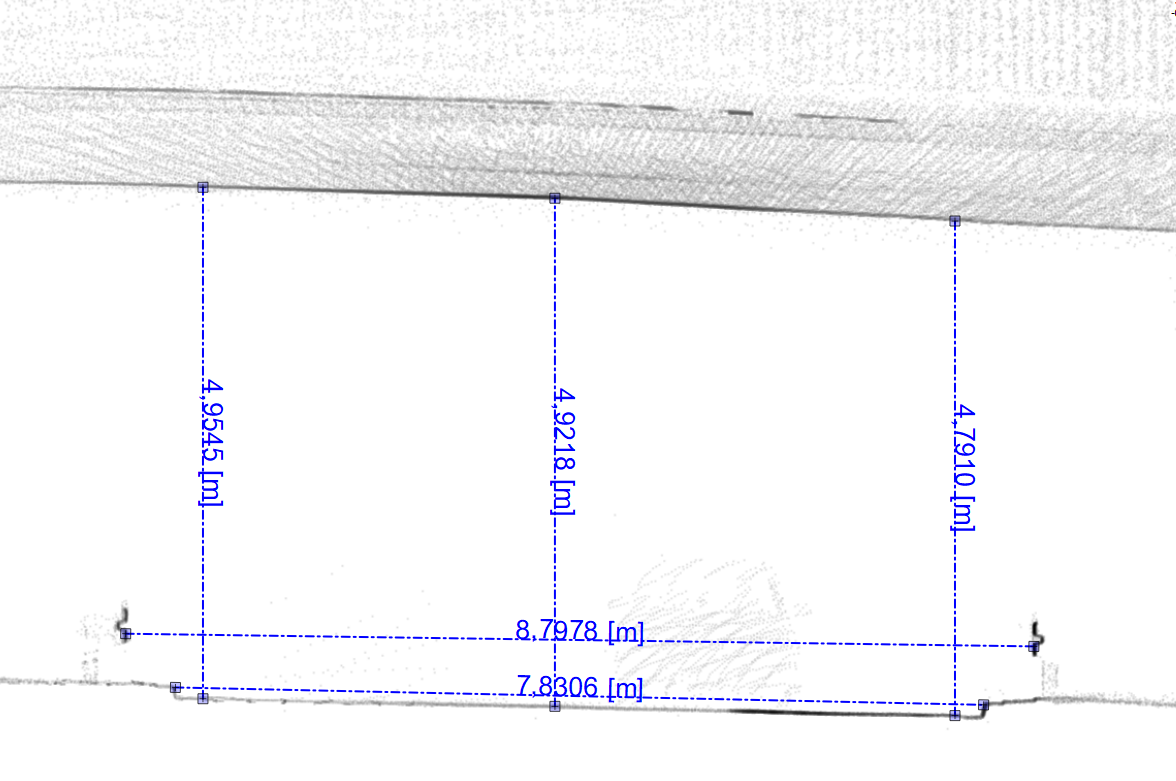

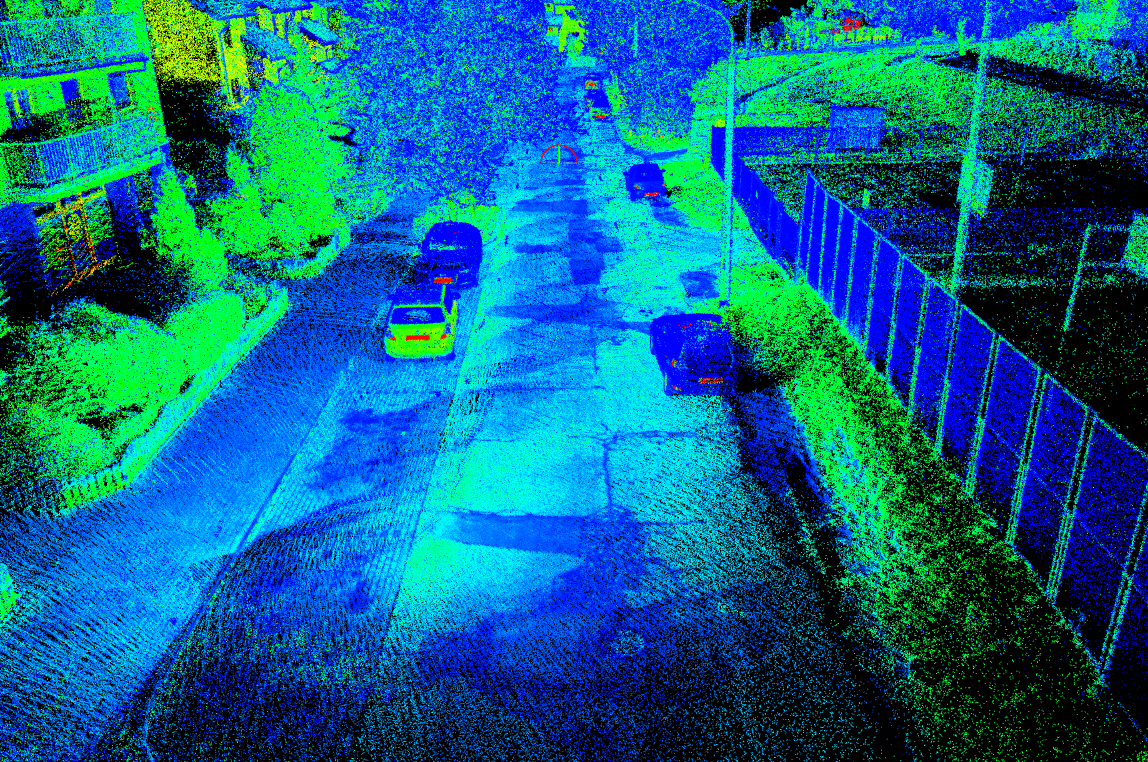



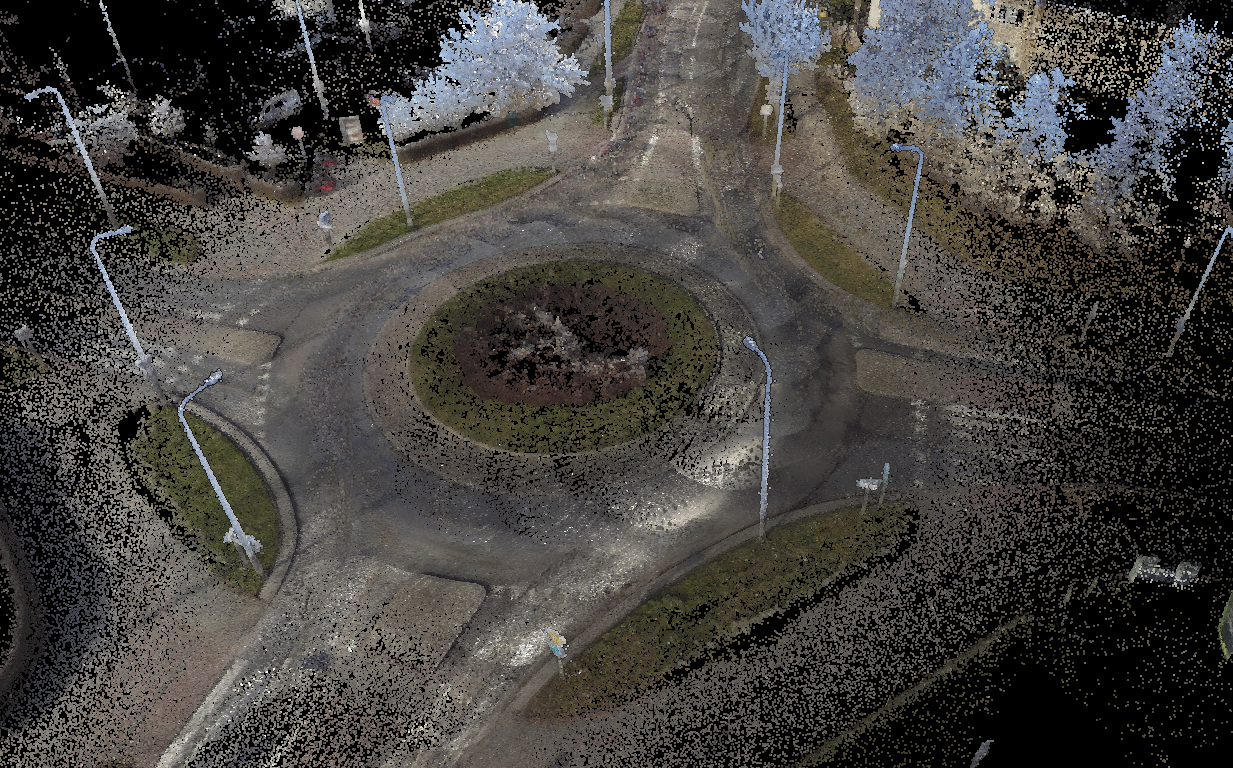
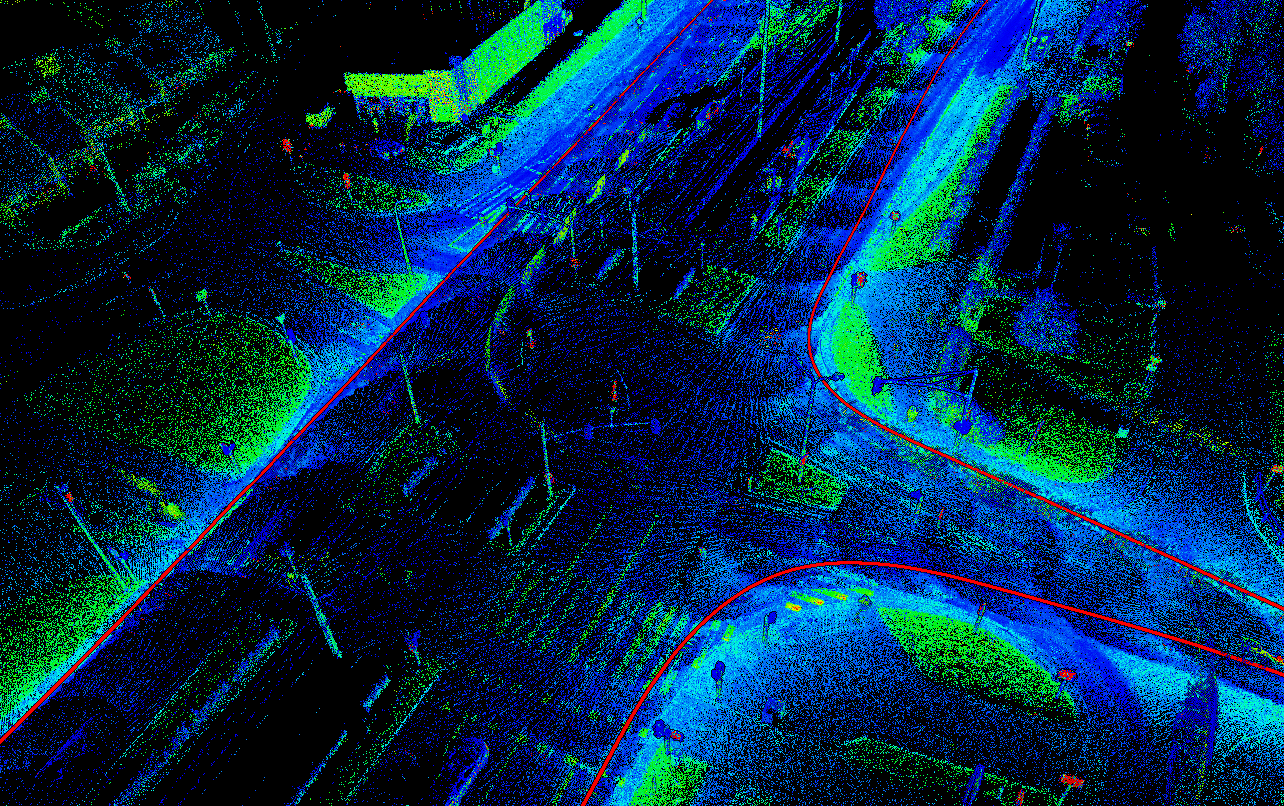
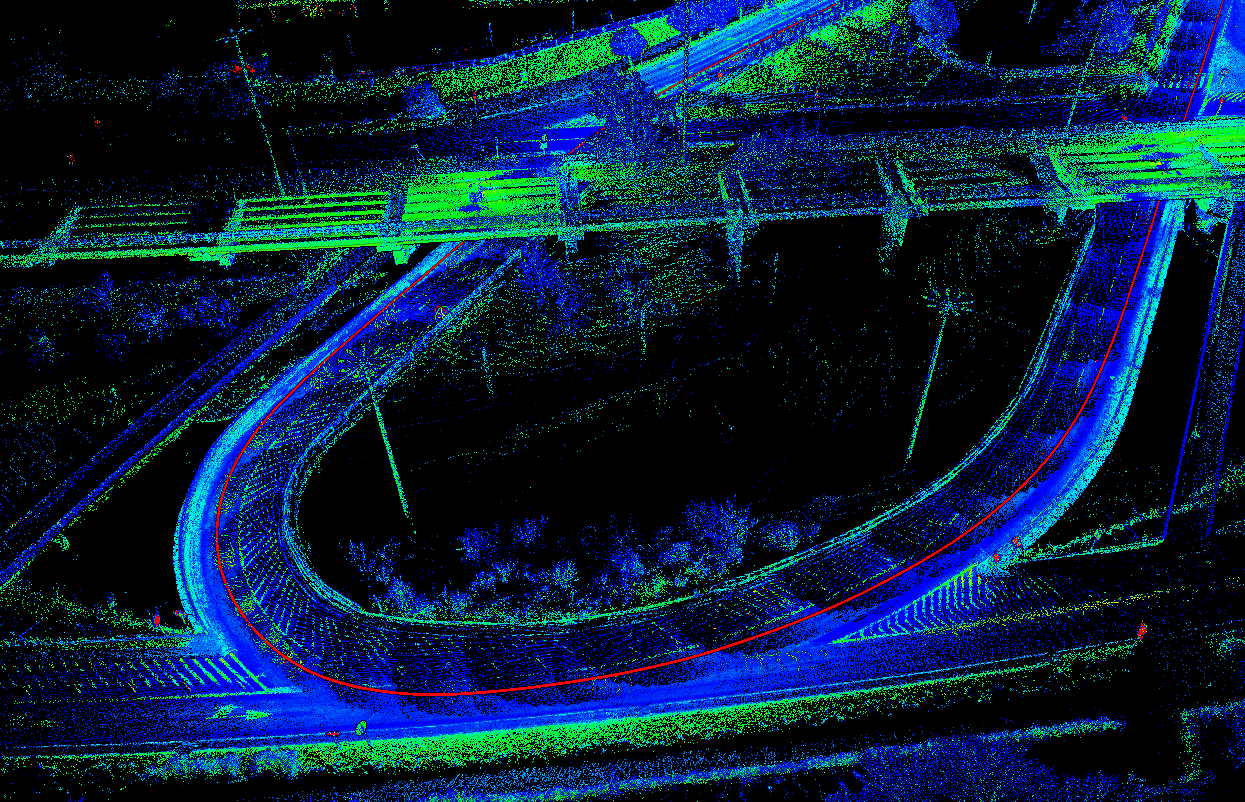
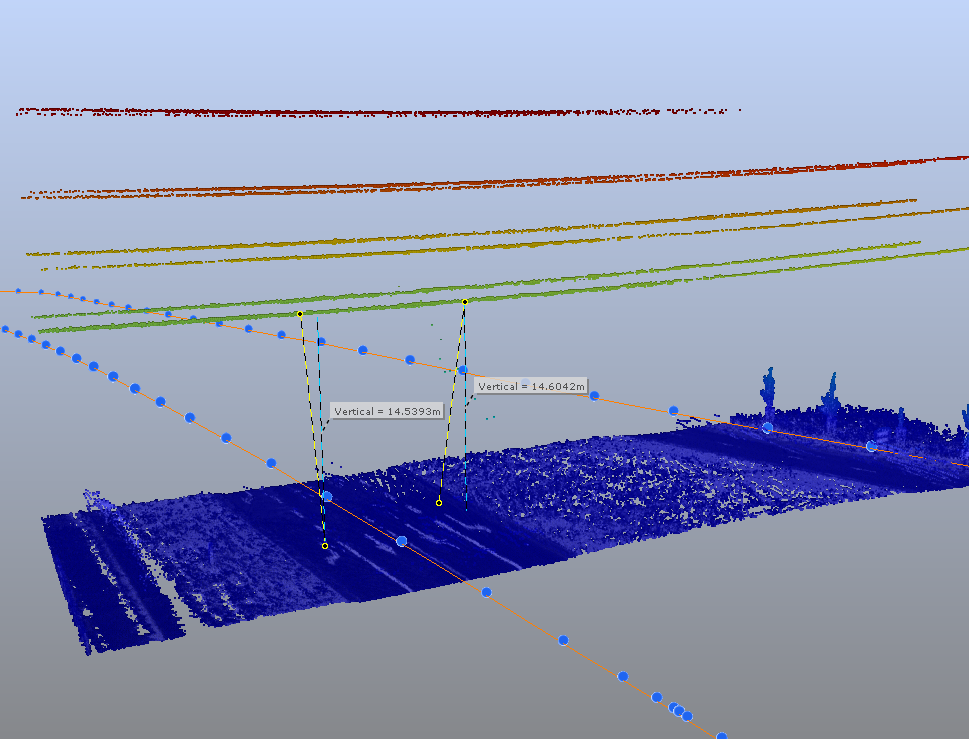

Як видно з отриманих даних, можна зафіксувати велику кількість інформації про дороги, зокрема:
Дані збираються швидко без необхідності зупиняти або обмежувати рух. Звісно, щоб дані були максимально повними та чистими, бажано проводити вимірювання при мінімальному трафіку, але, як бачимо, вони можливі і при інтенсивному русі.
Від наших клієнтів з гірничодобувної галузі ми знаємо, що сканери ZEB-Horizon та Orbis успішно виконували сканування з транспортних засобів під землею при зйомці шахтних виробок та інших елементів інфраструктури. Однак через нерівну поверхню сканер тримав оператор, щоб амортизувати рухи транспортного засобу та забезпечити можливість швидкого вимірювання відгалужень виробки (шляхом виходу з транспортного засобу і самостійного проходження цього відгалуження). Також успішно виконувалися вимірювання шахтних стволів за допомогою ліфта. Глибина стволів сягала навіть кількох сотень метрів. На жаль, через конфіденційність цих даних ми не можемо їх представити в цій статті.
Всі вимірювання, які ми проводили, здійснювались у локальній системі координат сканера. Щоб мати можливість прив'язати скани, наприклад, до геодезичної системи координат, необхідно було б скористатися функцією сканера — вимірюванням контрольних точок — і встановити GNSS-приймач на фіксованій відстані від сканера. Потім під час вимірювання необхідно було б зупинитися, запустити вимірювання контрольної точки і одночасно зареєструвати позицію GNSS-приймача. Після цього в програмному забезпеченні FARO Connect або Scene можна завантажити точки з приймача, вказати відстань (offset) між сканером і приймачем та використати ці точки для перерахунку скану, щоб отримати дані в геодезичній системі координат.
Даних, отриманих за допомогою мобільного сканера, встановленого на автомобілі, було цілком достатньо для мети, заради якої проводились ці тести, а саме — планування маршрутів негабаритних перевезень. Завдяки тому, що відскановано весь простір навколо дороги, можна оцінити, чи зможе транспорт певних габаритів проїхати без необхідності втручання в інфраструктуру (наприклад, зняття дорожніх знаків).
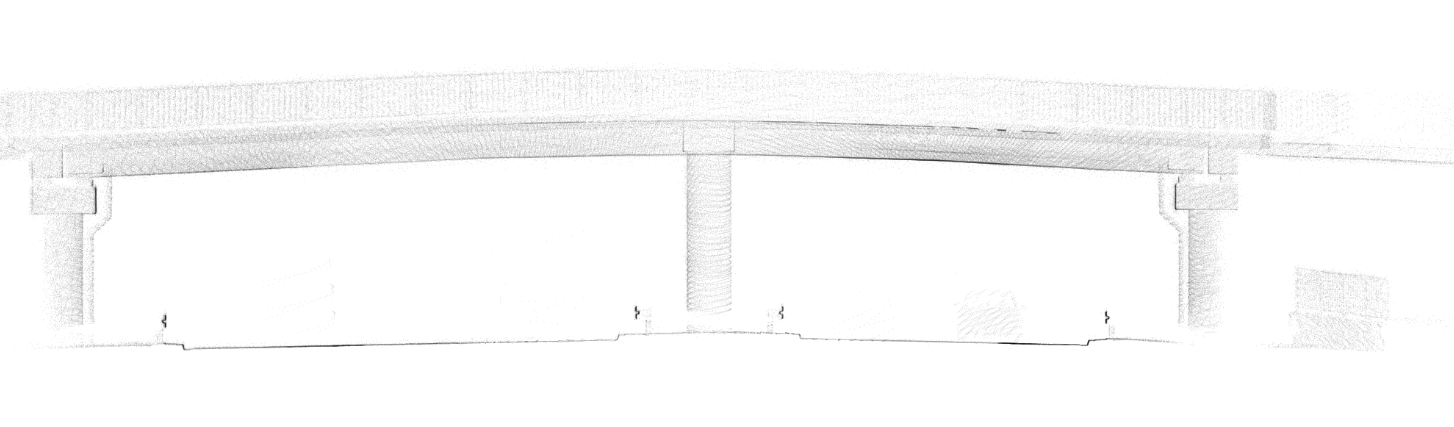
Скани, зроблені з транспортних засобів, також можуть бути корисними як доповнення до даних, отриманих типовим для цього сканера способом — оператором, який рухається пішки. Це може бути, наприклад, вимірювання мостів та шляхопроводів, де з пішохідних зон можуть бути видимими не всі елементи об'єкта.
Однак слід пам'ятати: якщо завдання виконуються виключно на відкритій місцевості або на великих відстанях, і при цьому необхідно зберігати хорошу та стабільну точність позиціювання в геодезичній системі координат, обов'язково потрібно використовувати рішення, спеціально розроблені для таких вимірювань — тобто спеціалізовані системи MLS для роботи з транспортними засобами.
 Будівельне обладнання
Будівельне обладнання
 Геодезичне обладнання
Геодезичне обладнання
 Дрони та 3D сканери
Дрони та 3D сканери
 Аксесуари
Аксесуари
 Послуги
Послуги
Кошик порожній







































































































































